Assembling the LAOS electronics boards » History » Revision 5
« Previous |
Revision 5/14
(diff)
| Next »
KalleP, 2012-11-22 21:18
Clarifications, a few rev 0.4 updates
- Table of contents
- Assembling the LAOS electronics boards
- Board version, layout and schematics
- Soldering the board
- Testing the board
- Test firmwareNow you should be ready to load the TestFirmware
Assembling the LAOS electronics boards¶
Board version, layout and schematics¶

- Rev 0.1 has no LOGO, it has some very visible bugs. One of the is that the LED connectors have no pre-tinned pads on both sides of the board, but only on the top side. If you see that, you most definitly have Rev 1. See Mainboard_Rev1
- Rev 0.2 has a LaosLaser LOGO under the SD. See Mainboard_Rev2
- Rev 0.3 has no LOGO, but it says LAOS Board v0.3 just above the MBED.
- Rev 0.4 has LaosLaser LOGO under MBED and reads LAOS Board rev4 on USB side of MBED.
The older boards have small bugs, but none of them is bad enough to replace your old board with a newer one. The bugs can be fixed with simple soldering solutions, making the boards just as good as Rev 0.3. The Rev 0.4 is also a minor bug fix with extra filter capacitors under the Pololu stepper drivers is an improvement.
Before you start soldering:- read the LAOS_Mainboard_v03 page and make sure you have the parts you need
- download layout and schematics PDF's from the bottom of that page, and print them out, or have them available for reference on your PC monitor.
This simplifies searching for component location and component values.
Soldering the board¶
SD card socket¶
Solder the SD card socket in place first on the component (top) side, as it is the only SMD component and it's nice to have some space around it when soldering. Remember to solder the shield pads from the bottom
DIL Sockets¶
Place the two DIL sockets the opto-couplers (OPTO-IN, OPTO-OUT) and the one for the CANBUS chip (optional) and solder them in place, keeping the index notch on the same end as indicated on the board.
MBED footprint¶
Solder two rows of pin receptacles in place for the MBED. The outer rows are optional (debugging or expansion only).
Pololu only¶
If you want to use Pololu stepper drivers or the compatible [http://reprap.org/wiki/StepStick StepStick] drivers:
Solder in the two rows of pin header sockets for each Pololu.- J8: Z-Axis
- J17: Y-Axis
- J23: X-Axis
- J32: Extra (Extruder, Rotation) Axis (probably you can skip this one for a laser)
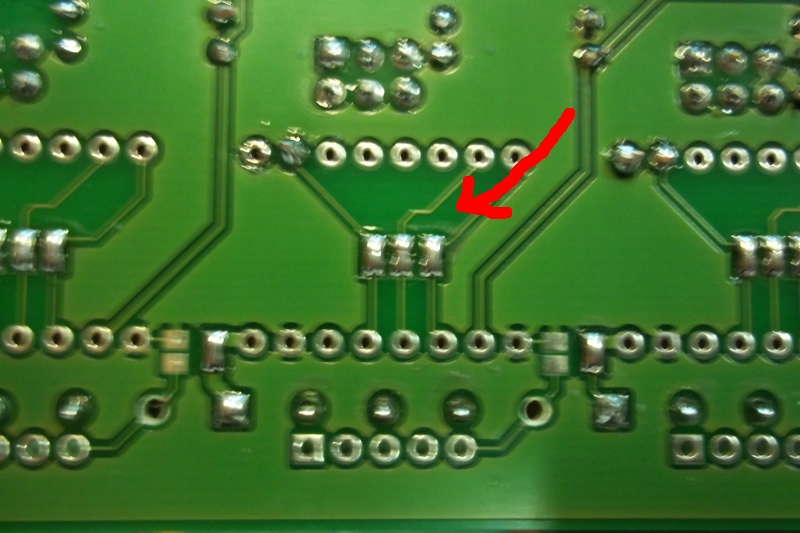
On the solder (bottom) side of the board, there are 4 groups of 3x2 solder pads next to the Pololu headers. With these solder pads you can configure microstepping on the Pololu's. If you connect all of them, you get the maximum number of microsteps. '''Note:''' do not connect the (90 degree rotated sets of) solder pads '''inside''' (3 of the 4) the Pololu footprints. These pass through jumpers should be connected '''only''' if you are using externals stepper drivers, instead of Pololu's, at which point the Pololu configuration jumpers are ignored.
Non-Pololu only¶
If you're not using Pololu-compatible stepper drivers on the mainboard but some other ''external'' stepper driver boards:- Connect the solder pads on the bottom of the board (under the Pololu footprints) two by two
- GND: this can be enabled on the outgoing connectors by filling the solder pad under the connector.
- Some voltage: you can use Vmot by filling the solder pad under the connector (the square pole is +). If you need 3V3 you can make a wire between the pololu pins (10) and (14). If you need 5V, you can make a wire from a 5V net to pololu pin (14).
If you need all five pins, the standard Phoenix connectors will not fit, so you will have to get Phoenix mini or other connectors (e.54mm pitch).
Resistors¶
Find the resistors and put them in the print.| Value | Count | Resistor numbers |
|---|---|---|
| 100 Ohm | 1 | R34 |
| 120 Ohm | 1 | R1 |
| 330 Ohm | 4 | R28, R29, R31, R32 |
| 1K | 15 | R2, R3, R6, R11, R12, R14, R15, R17, R22, R23, R24, R26, R27, R30, R33 |
| 2K2 | 2 | R7, R8 |
| 10K | 11 | R4, R5, R9, R10, R13, R16, R18, R19, R20, R21, R25 |
Bear in mind that R8 (which sits underneath R7 may have a trace crossing it so it may appear like R6), make sure that this is not the case, the real R6 is part of the R4, R9 and R6 row).
You can solder in all resistors, or omit the ones you don't need. We advise to leave out resistor R10 and R12 for now, because these can do BAD THINGS (tm) to your MBED if you choose the wrong value. Their correct values are handled in a later chapter.
Resistor list¶
| Number | Value (Ohm) | Function | Common | Optional |
|---|---|---|---|---|
| R1 | 120 | Can Bus | Only needed for Can Bus | |
| R2 | 1K | Magjack LED | X | Only needed for Magjack with LEDs |
| R3 | 1K | Magjack LED | Can be omitted, only needed when Magjack has LEDs! | |
| R4 | 10K | Enable LED | X | If you do not want LEDs on your board, this resistor is not needed |
| R5 | 10K | VMOT LED | X | If you do not want LEDs on your board, this resistor is not needed |
| R6 | 1K | Z Axis Pololu Microstepping Pull-UP | Only for machines with Z-Axis and Pololu | |
| R7 | 2K2 | I2C | X | Only for machines with I2C display |
| R8 | 2K2 | I2C | X | Only for machines with I2C display |
| R9 | 10K | Z Axis Pololu Microstepping Pull-Down | Only for machines with Z-Axis and Pololu | |
| R10 | J14 AIN Pull-UP | Only needed if J14 is used | ||
| R11 | 1K | Y Axis Pololu Microstepping Pull-UP | X | Only needed on machines with Pololu |
| R12 | J14 AIN Pull-Down | Only needed if J14 is used | ||
| R13 | 10K | Y Axis Pololu Microstepping Pull-Down | Only needed on machines with Pololu that do not do full microstepping | |
| R14 | 1K | X Axis Pololu Microstepping Pull-UP | X | Only needed on machines with Pololu |
| R15 | 1K | J27 Analog output signal | Only if J27 is used | |
| R16 | 10K | X Axis Pololu Microstepping Pull-Down | Only needed on machines with Pololu that do not do full microstepping | |
| R17 | 1K | J27 Analog output signal | Only if J27 is used | |
| R18 | 10K | YHOME Pull-UP | X | |
| R19 | 10K | XHOME Pull-UP | X | |
| R20 | 1K | E Axis Pololu Microstepping Pull-UP | Only for machines with E-Axis and Pololu | |
| R21 | 10K | ZMIN Pull-UP | Only for machines with Z-Axis | |
| R22 | 10K | ZMAX Pull-UP | Only for machines with Z-Axis | |
| R23 | 1K | ZMAX OPTO | Only for machines with Z-Axis | |
| R24 | 1K | ZMIN OPTO | Only for machines with Z-Axis | |
| R25 | 10K | E Axis Pololu Microstepping Pull-Down | ||
| R26 | 1K | XHOME OPTO | X | |
| R27 | 1K | YHOME OPTO | X | |
| R28 | 330 | Exhaust OPTO | X | All machines, because exhaust out is used for PWM right now! |
| R29 | 330 | Laser Enable OPTO | X | Not in use, but advise to solder it in anyway! |
| R30 | 1K | 5V Power LED | X | If you do not want LEDs on your board, this resistor is not needed |
| R31 | 330 | Laser PWM OPTO | X | |
| R32 | 330 | Laser ON OPTO | X | |
| R33 | 1K | AIN voltage divider | Only if AIN is in use | |
| R34 | 100 | AOUT current limit | Only if AOUT is in use |
Capacitors¶
Place the capacitors:
| Number | Value | Function | Comment |
|---|---|---|---|
| C1 | 100 nF | Magjack noise filter | |
| C3 | 100 nF | VMOT noise filter | |
| C4 | 1000 uF Elec | VMOT buffer | make sure the + goes through the square hole. |
| C5 | 100 nF | AIN noise filter | Can be omitted if AIN is not used |
| C6 | 100 uF Elco | VCPU Buffer | make sure the + goes through the square hole. |
| C7 | 22 nF | VCPU noise filter | Can be omitted if no voltage regulator (7805) is used |
| C8 | 100 nF | +5V noise filter | |
| C9 | 100 uF Elec | Step motor filter | make sure the + goes through the square hole. |
| C10 | 100 uF Elec | Step motor filter | make sure the + goes through the square hole. |
| C11 | 100 uF Elec | Step motor filter | make sure the + goes through the square hole. |
LEDS¶
Place the 3 leds, matching the flat side of the LED with the flat side of the led-drawing on the pcb. It's hard to see, but there is a flat side on the circles! It turns out that it is always towards the closest edge of the board. Also some LEDs have no flat at all, the shorter leg is the one on the flat side (the cathode or negative).
USB connector and network connector¶
Place the USB and network connector. The USB is currently not used, so it's optional.
Connectors¶
Choose connectors that fit your laser best. Examples:
Default configuration¶
- 7 4-pin phoenix connectors:
- X, Y, Z connectors (J24, J18, J9)
- XY endswitch, Z-/Z+ endswitch (J34, J29)
- Laser P1,P2 (J37)
- PWM out (J27)
- 3 2-pin phoenix connectors
- Laser P4 (J39)
- Power supply (J38)
- Cover lid switch (J14)
- 1 5-pin phoenix connector (which is actually not in use at all!)
- J33
- 1 4-pin header
- I2C (J10)
HPC LS-3020¶
- 4-pin JST connector on Y-axis (J18)
- 4-pin JST connector on J38 (laser ON/PWM)
- flatcable connector on P1 (X-axis, X+Y endstops)
- 3-pin Phoenix/Wuerth connector on J5 (Power)
- 4-pin JST connector on J10 (I2C)
HPC LS-3020 Pro¶
- 4-pin JST connector on Y-axis and X-axis (J18, J24)
- 4-pin JST connector on J38 (laser ON/PWM)
- 4-pin JST connector on J34 (X+Y endstops)
- 3-pin Phoenix/Wuerth connector on J5 (Power)
- 4-pin JST connector on J10 (I2C)
Transistors¶
- Solder in the two Darlington PNP Transistors (optional)
Powering the board¶
The board offers several options for getting power:
Variable options¶
- J38 can be used to connect power for the board. The input power should be between 5 and 12 volts. If the power level is exactly 5V, the 7805 can be omitted and should be short-circuited with a wire between pole 1 and 3. If the power is higher then 5V or coming from a cheap adapter, using the 7805 is recommended.
- J5 can be used as a two-pole connector for VMOT (motor power for Pololu steppers). It can also contain the board input power on the 3rd pole, but then J38 should be omitted.
- Finally, J5 can be used to supply the same supply voltage to the CPU AND for motor power to the steppers by making a jumper wire on the connector just above J5 (next to the legend "exhaust enable").
HPC 3020 laser¶
The HPC laser comes with a plug with 5V and 24V combined. This can be connected to J5. The 7805 should be omitted and replaced by a jumper wire between pole 1 and 3.
R10 and R12 resistors¶
Depending on the use of J14 and the power on VMOT, determine the correct values for R10 and R12.
Power Jumpers¶
The board contains 2 extra power jumpers to select power on inputs
VEndstops Voltage selection¶
Place pin header on J43 for voltage selection on the sensors. This is the four-pin T-footprint near the endstop terminals.
For HPC LS3020, connecting the middle pin with +5V with a wire will do.
VSensor (J27) Voltage selection¶
The second power jumper is a 3-pin jumper labelled VCPU/VSENSOR/5V. It is located between the MBED and the 7805 regulator position close to a 100 uF capacitor. This can be connected in two ways:- VCPU -> VSENSOR: use VCPU (usually +3.3V) as the supply for the sensors.
- 5V -> VSENSOR: use +5V as the supply for the sensors.
Connect only one of the outer pins with the middle pin at the same time!
PWM Output select jumpers¶
01SRC/02SRC: select which PWM value is selected for output via the transistors.
Testing the board¶
Visual double check¶
Check your board without power, to see if everything is al right- Visually check all solder joints
- Check all soldered wire-bridges and jumper settings
Power check¶
First remove the MBED, SDCARD, POLOLUs, OPTO-COUPLERS
Power check 1¶
- Apply power (CPU and motor).
- Now check the voltages on the pins of the MBED (5V on pin 2, no voltages on other pins)
- Check Vmotor (usually 24V) on the Pololus
- Check ground connections on Pololus (by measuring between 5V and those pins)
Power check 2¶
- Disconnect power
- Insert the MBED (with USB connector towards network connector)
- Connect the MBED to your PC or USB hub with the USB cable
- Check all 3.3V logic supplies to:
- Pololus
- Opto-couplers
- SD-card
If you are absolutely sure all power connections are OK, install the other components and proceed with the functional tests.
WRONG JUMPER CONNECTIONS OR BAD SOLDERING CAN CAUSE YOUR COMPONENTS (OR EVEN YOUR COMPUTER) TO START SMOKING AND CAUSE A LOT OF DAMAGE, MAKE SURE YOU CHECK AND DOUBLE-CHECK EVERYTHING BEFORE CONNECTING THINGS
Insert the OPTO-Couplers¶
The KB847 chips have a tiny line on one side. With the notch on the top, this is the left side of the chip. So on OPTO-IN, the line should be on the side of the SD card. On OPTO-OUT the line should be on the side of the MBED.
Put the Opto-coupler IC's in place, and the CAN chip and test again. Place a (max 2GB) SD card.
Test firmware
Now you should be ready to load the TestFirmware¶
Updated by KalleP about 13 years ago · 5 revisions